FlexADis – Flexible Automatisierbarkeit der Handhabungsprozesse paketfähiger Ware in Distributionszentren
Im Projektzeitraum von April 2009 bis März 2011 wurden Lösungsansätze erarbeitet, wie Produkte unterschiedlichster Art bei der Warenvereinnahmung, Kommissionierung und Verpackung mit kombinierten manuellen und automatischen Verfahren gehandhabt werden können. Denn durch einfache mechanische Lösungen könnte der heute oft sehr teure automatische Handhabungsprozess wirtschaftlicher gestaltet oder auch die Flexibilität eines Logistiksystems durch eine Kombination aus automatischen und manuellen Prozessen gesteigert werden.
Projektkonsortium
- Adolf Würth GmbH & Co. KG
- Arotec Automation und Robotik GmbH
- FIFL GmbH
- Institut für Fördertechnik und Logistik (IFT), Universität Stuttgart
- Sick AG
Ausgangssituation
Üblicherweise wird der Handhabungsprozess von Waren in Distributionszentren entweder vollautomatisch oder rein manuell durchgeführt. Aufgrund der enormen Vielfalt der unterschiedlichen Artikeleigenschaften ist allerdings ein automatisches Handling für die Gesamtheit aller möglichen Artikel aus heutiger technischer Sicht nicht umsetzbar.
Vorgehensweise
- Analyse der Handhabbarkeit von Artikeln mit Bewertung hinsichtlich ihrer technischen Greifbarkeit, einschließlich experimenteller Greifversuche,
- Optimierung der Greifermatrix,
- Aufbau einer roboterbasierten Demonstrationszelle als funktionaler Nachweis für die automatische Kommissionierung; hier mit einem einem 6-Achs-Industrieroboter mit zugehöriger Steuerung KRC2, der zur Erweiterung des Arbeitsraums auf einer Linearachse montiert und mit einem Kombi-Greifer versehen wurde, der einerseits die Produkte über eine integrierte Sensorik auf den Paletten lokalisiert, andererseits die lokalisierten Produkte mit einem Vakuumgreifer aufnehmen kann,
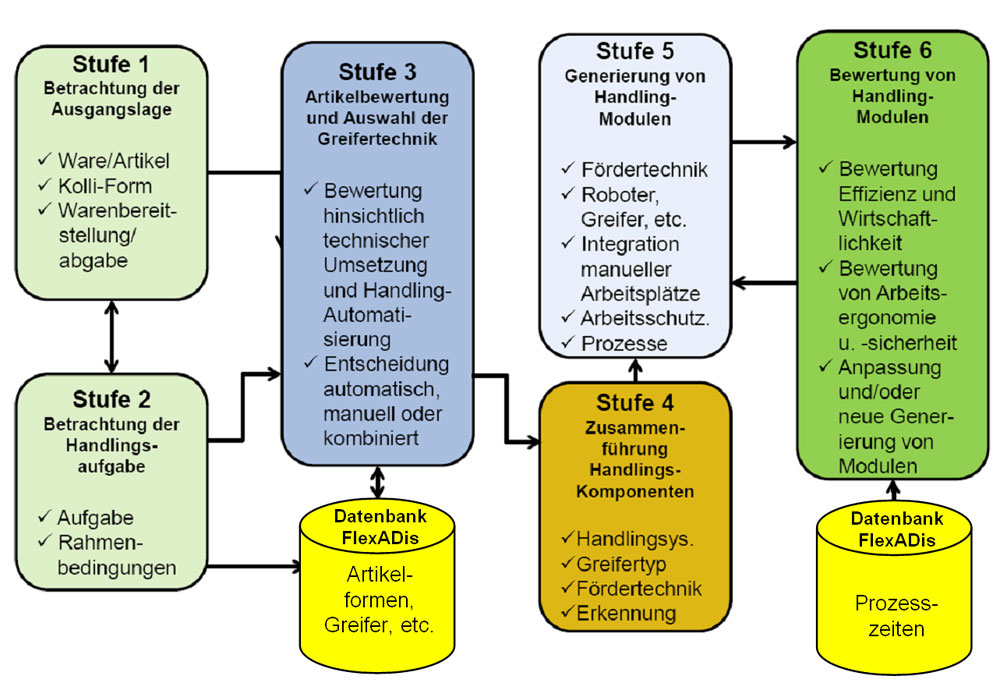
- Entwicklung einer Methodik zur Planung flexibler Handhabungssysteme.
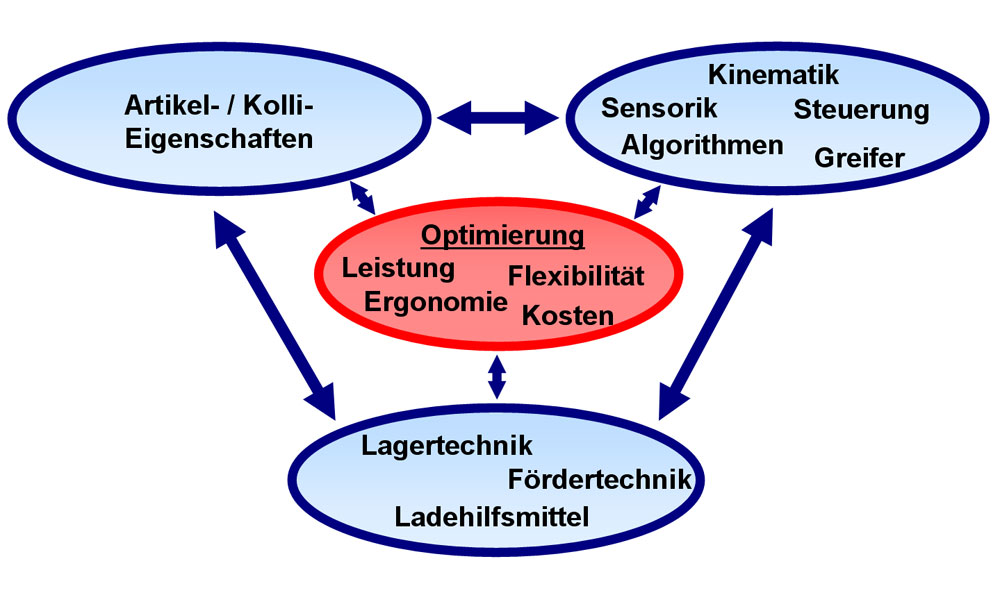
Projektergebnis
Es wurde eine Methode neu entwickelt, die die gegenseitigen Abhängigkeiten sowie komplexen Wechselwirkungen zwischen verschiedenen Artikeln, Handhabungstechniken und Bereitstellungsverfahren berücksichtigt. Auf der Grundlage einer datenbankgestützten Informationsbasis kann nun bereits in der Planungsphase eines (halb-)automatischen Handhabungssystems eine technischen Machbarkeitsuntersuchung durchgeführt werden. Zusätzlich wurden die Praxistauglichkeit neuer Verfahren im Bereich der optischen dreidimensionalen Objekterkennung erforscht und innovative Ideen für die Entnahme von Einzel- bzw. Mehrfachartikeln entwickelt.

Kontakt
Kurzbeschreibung des Projektes (pdf, 1 Seite).